Hello everyone! During this semester I worked on deployable structures. Here you will find one of the ways how to create and simulate Hoberman mechanism. I have tried a lot of ways. I think this way is the simplest one.
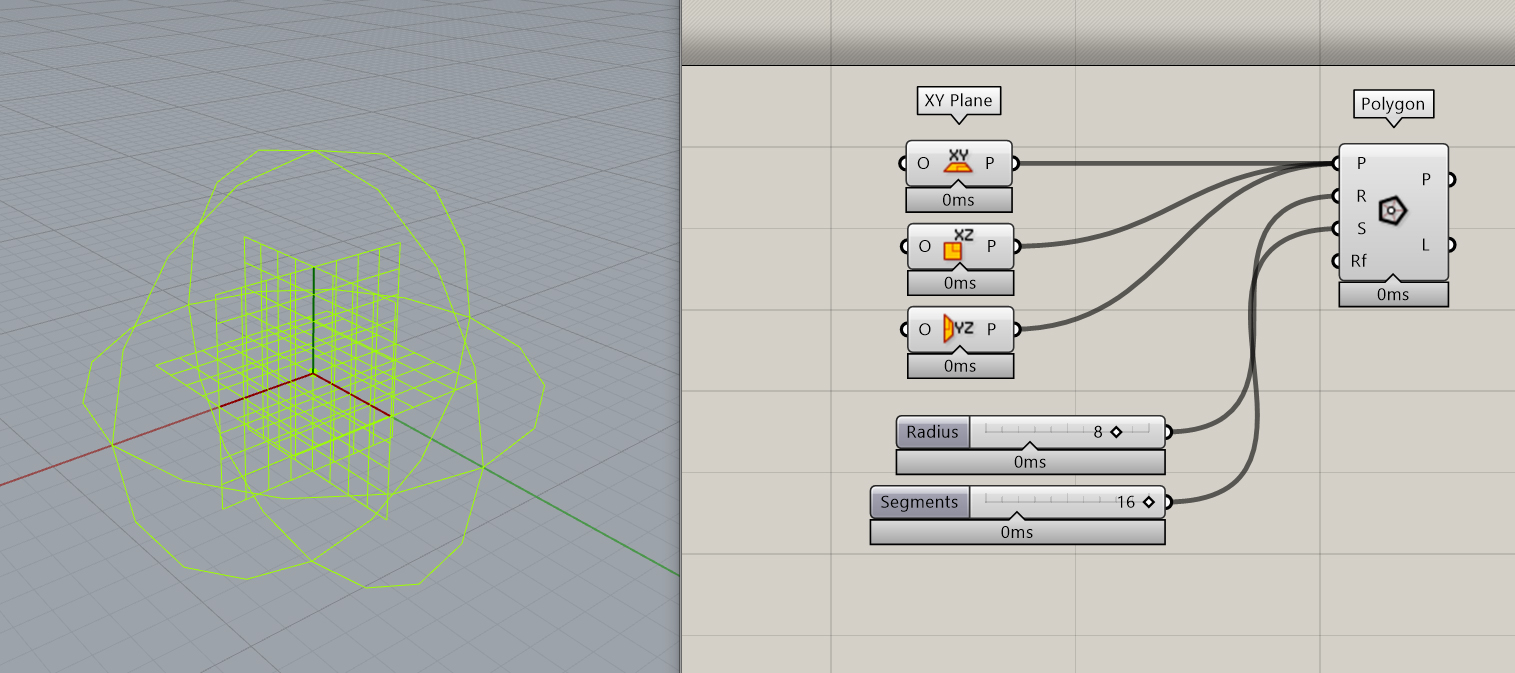
1 step
Let’s create polygons in XZ XY ZY planes.
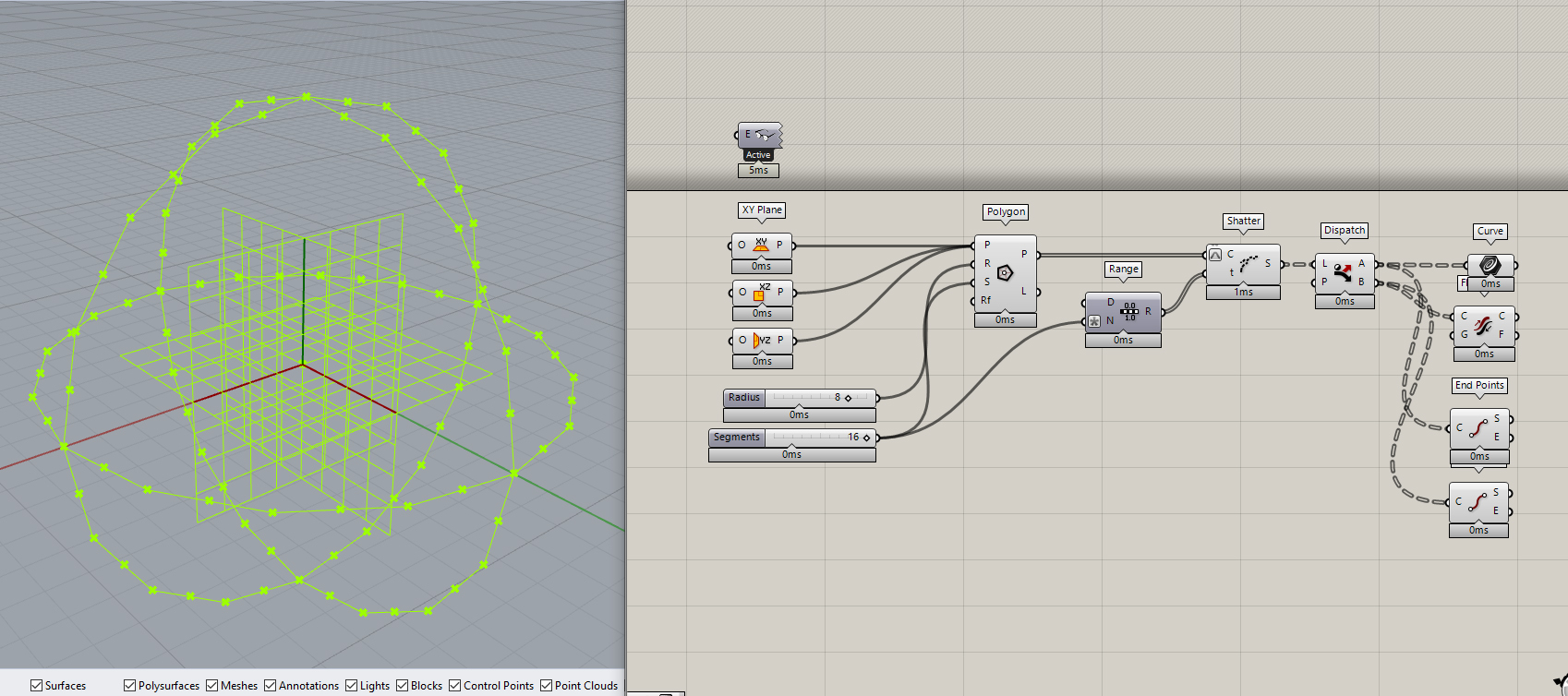
2 step
Then I divided polygons with a help of shatter. t parameter is generated with a help of range. Number of steps = number of segments * 2. Don’t forget to reparametrize curve) Then I used dispatch in order to divide data
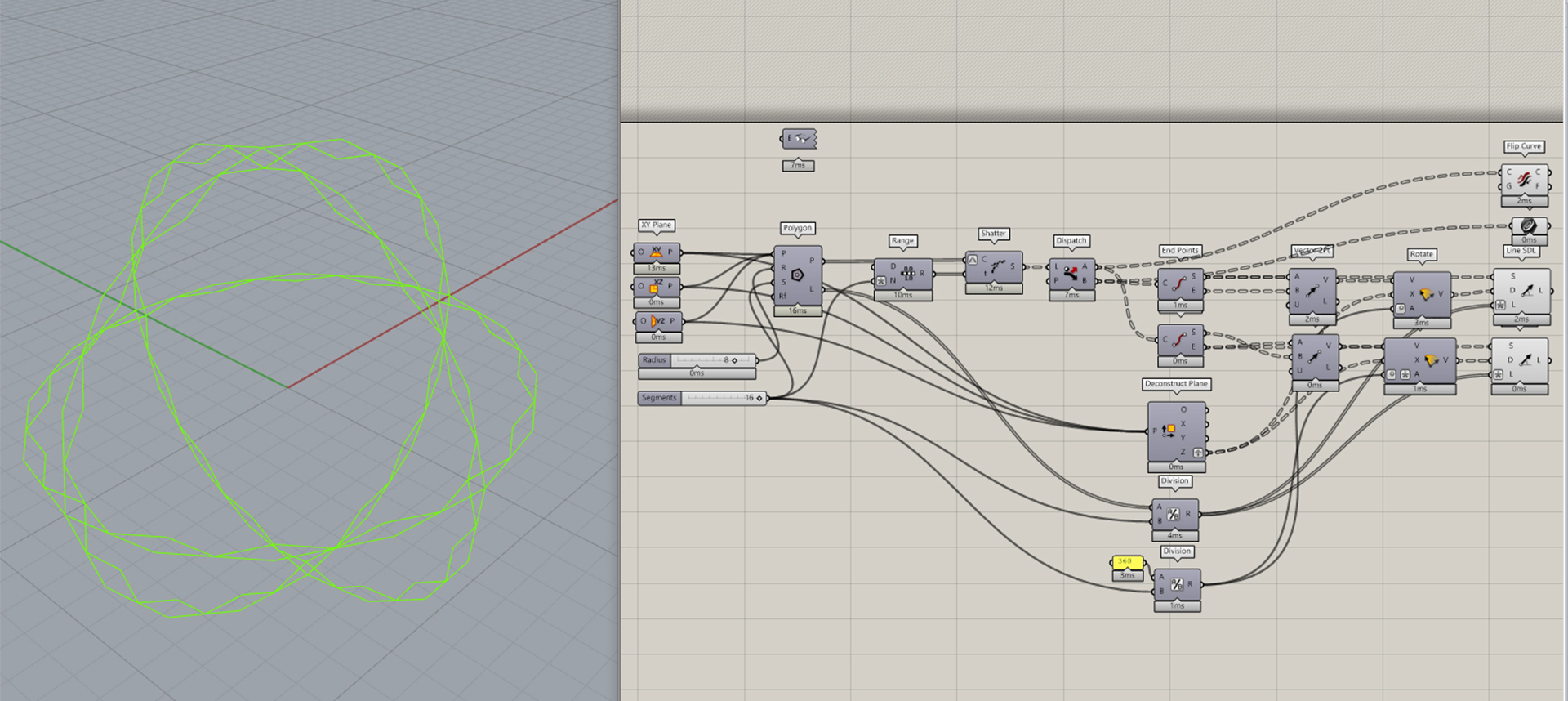
3 step In this step I worked with divided curves. I rotated them in order to make a scissor unit. Don’t forget to use an expression X*(-1) on input ( Angle). Line SDL – L input with expression x/x
4 step Let’s merge data streams. Then I had to define points for kangaroo simulations. Don’t forget to get rid of duplicates points :)

5 step Kangarooooooooooo time !!!
Points that were defined before are anchors. As every group of points lies in its plane (XZ XY ZY) I decided to choose AnchorXYZ ( Don’t mix up inputs where should be turned on prevention of movement). We should use Angle between two parts of scissor unit <>. We should also use Length(line).
Let’ s create target point where all the points shoould come. Target point should be constatnt – Anchor.

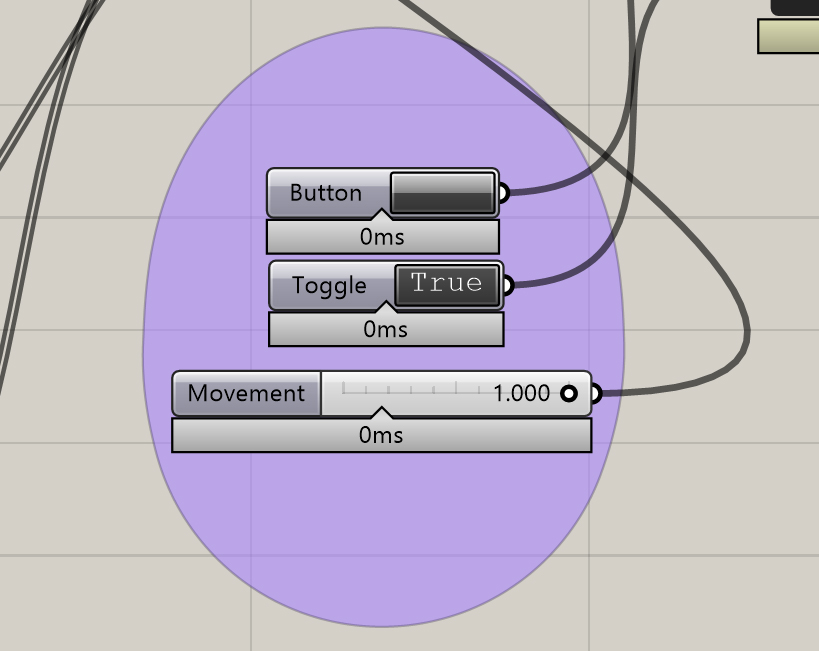
6 step how to control the deployment
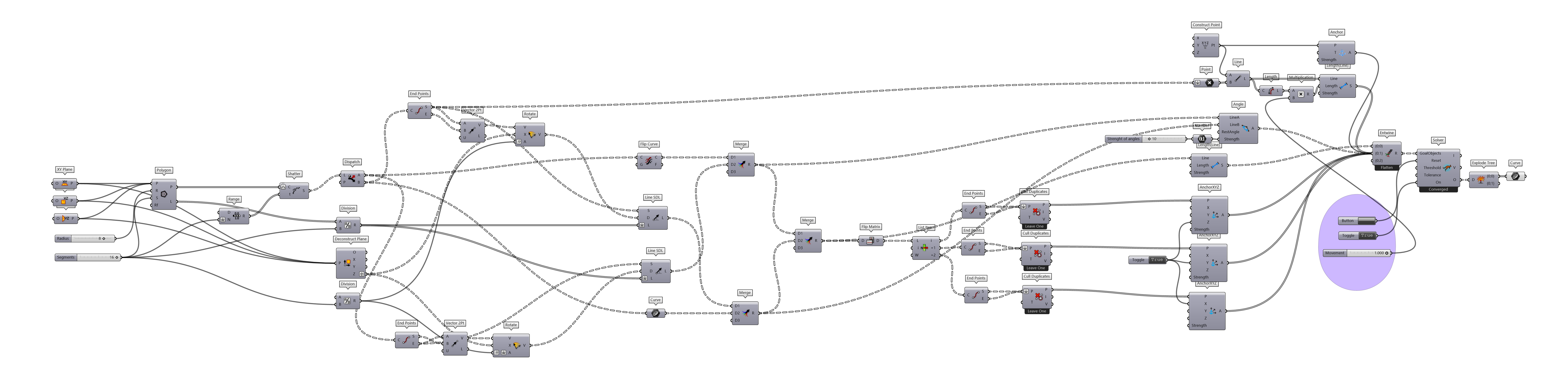
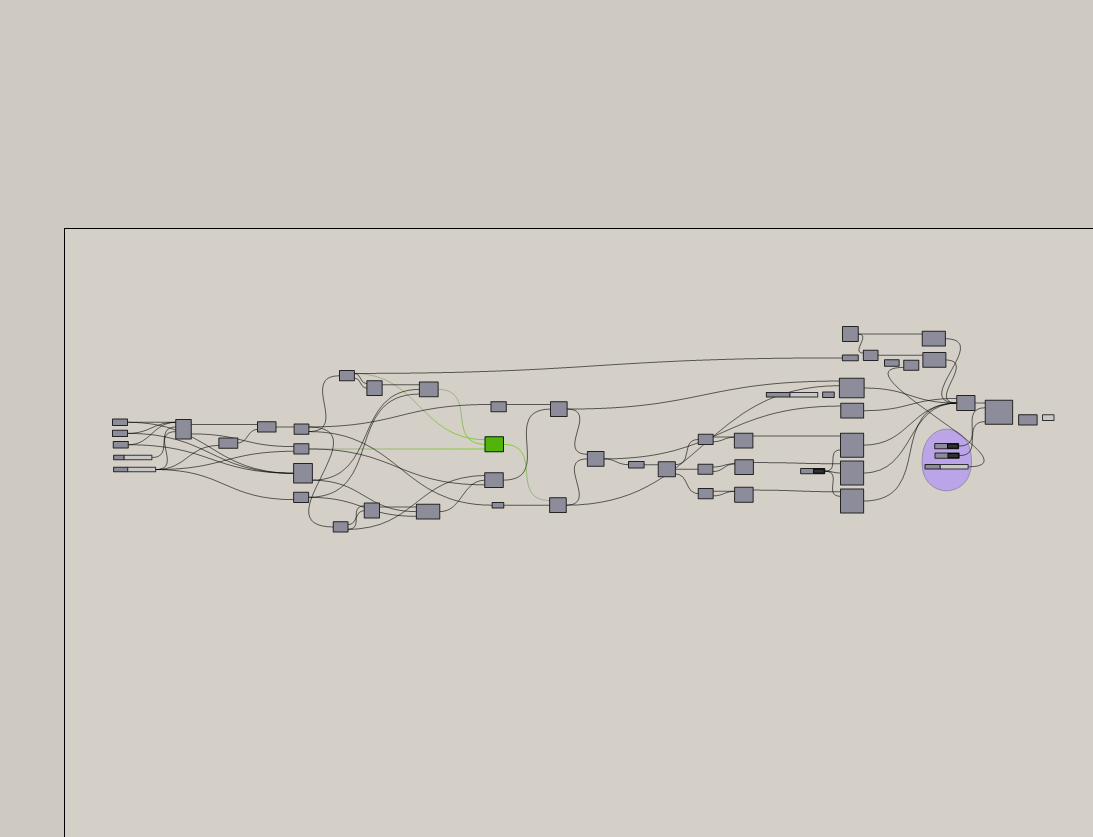
FULL SCRIPT
The main conclusion I drew from working on this project that there is an even simpler way to create something that you can imagine. Its all about knowledge and experience.
I would like to thank doc. Ing. arch. Miloš Florián for giving rise to the idea of working on deployable structures. Great respect for Ing. arch. Šimon Prokop for being in touch with us all the time.
Credits:
Soroush Garivani for sharing his way of creating geometry.
Just for comparison
old version
final version
Download link : https://drive.google.com/file/d/1Ck4pge352Xc5uLDZnt5CXfFbIEZtuW_F/view?usp=sharing
Thank you)